 |


















GX BOX 510
GUOXING
| Size: | |
|---|---|
| Grasping Force: | |
| Max Speed: | |
| Quantity: | |

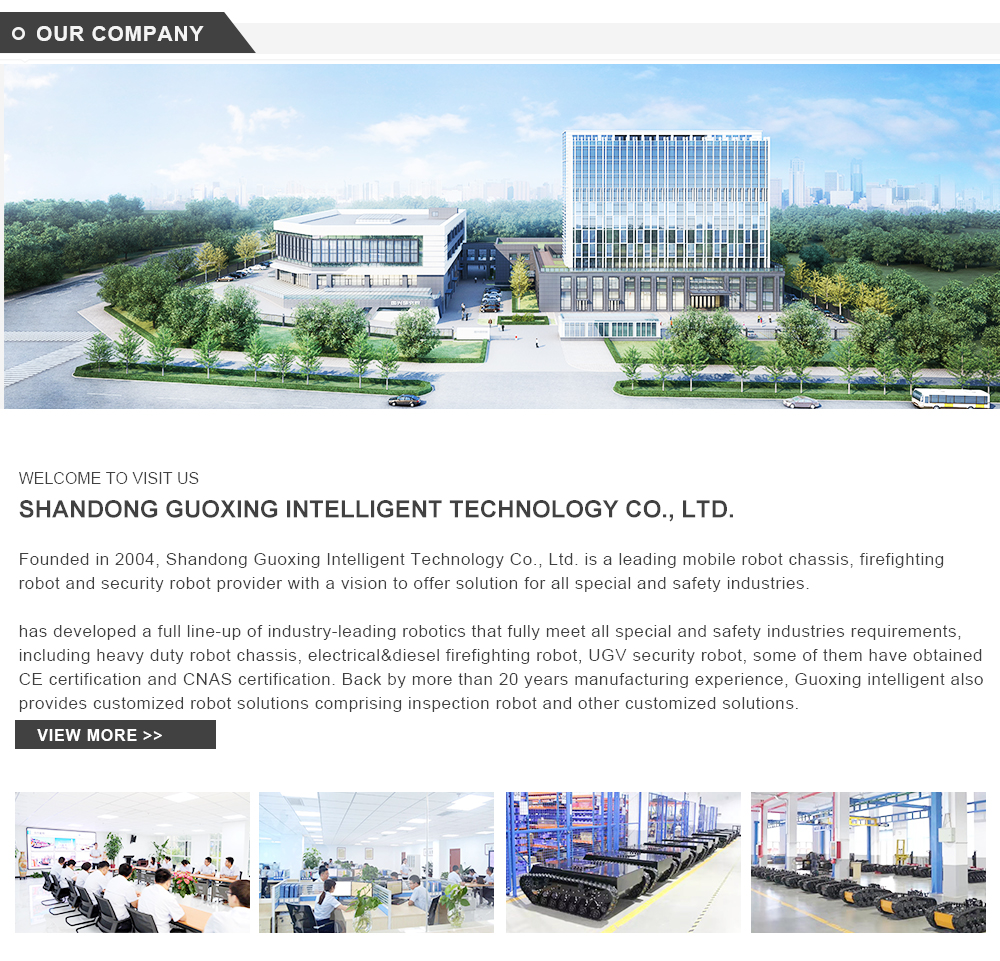
Gx Bot510 explosive disposal robot is a small modular explosive disposal robot, which can be mainly used for grasping, transferring, destroying and other operations of dangerous goods.
At the same time, the robot arm has seven degrees of freedom and is flexible. It can also be used for reconnaissance operations in narrow space.
The robot walking module adopts the "fin arm" crawler structure, which makes the robot have super obstacle climbing ability and can adapt to a variety of complex terrain such as sand, rubble, grassland and so on. The structure of the robot is firm, light, dustproof, waterproof, shockproof and anti-corrosion. All performance indexes meet the requirements of the national military standard.
With strong obstacle climbing ability and fin arm crawler structure, the robot can easily climb stairs, gullies and other obstacles.
Fast movement speed, equivalent to human trotting speed, stepless speed change, and also has large torque at low speed.
Small size, light weight, can be carried by one person, can be put into the trunk of the car, and the transportation is convenient.
Integrated mechanical arm pan tilt, 7 + 2 degrees of freedom design, more flexible grasping and observation.
Modular design, battery module, PTZ module and manipulator module can be quickly disassembled and replaced, which is convenient for maintenance.
Strong protection, dustproof, waterproof, shockproof and anti-corrosion. All performance indexes meet the requirements of the national military standard.
With high intelligence, it has a variety of intelligent operation functions, such as one key deployment, one key reset, auxiliary grasping, auxiliary obstacle crossing and so on.
![]()

Firstly judge the quality of the object before control the robot to capture the object. The highest quota load level is 4kg of horizontal capture and 7kg of bending capture. The arm may be damaged if captures more than above weights.
The bending gesture is used to capture the object as far as possible for the actual weight of the object can hardly be judged correctly. Thus, the operator can avoid the tipping forward caused by the object with excessive weight.
When unfold to capture the object, the robot shall rotate the Swinging arm forward and touch the ground slightly for a support against the tipping. Even when with the Swinging arm, the robot shall not capture the object over 3kg to avoid the damage on the drive gear box of the Swinging arm.
Please apply the 3D movement mode for the capture of mechanical arm with double effect and less effort.

Four cameras are used for mutual observation as far as possible.
3D movement mode can be used for the detection mode on the high place. Specific operations are as below: firstly, the robot moves to semi-unfolding mode, and then chooses 3D movement mode. Swirl the rocker on the left to control the mechanical arm of the robot.
As to the detection on the low place, the robot can be firstly changed to the observation mode and then the 3D movement mode is chosen. Control the left rocker of the robot to control the movement of the P/T camera.
Transfer and destruction of suspicious items in public places (subway, airport, railway station, shopping mall, conference center, etc.).
Dud removal, roadside bomb removal, mine removal and other application environments.
Capture and transfer of substances in hazardous biochemical and toxic environment.
Reconnaissance, detection, object capture and transfer in the post disaster ruins environment.
Capture and transfer of articles in nuclear radiation environment, simple detection and maintenance.
Item | Specification |
Portable Controller | Real-time display of robot status,fast and convenient operation |
Mechanical Arm | 7+2 DOF |
Size | 830mm×550mm×430mm(Arm Folded) |
Self Weight | ≤40kg |
Battery | 24V,20AH(Optional 24V,40AH) |
LoadWeight | ≥70kg |
Max Speed | ≥1.5m/s |
Turn Radius | Situ Turning |
Obstacle Surmount | ≥200mm Obstacle | ≥38°Stairs| ≥40°Slopes |
Working Time | 3 Hours |
Protection Grade | IP65 |
Tracked Arm Length | ≥164mm |
Maximum Length of Mechanical Arm | ≥2000mm |
Grip Width | 3~170mm |


Contact us now!!
Gx Bot510 explosive disposal robot is a small modular explosive disposal robot, which can be mainly used for grasping, transferring, destroying and other operations of dangerous goods.
At the same time, the robot arm has seven degrees of freedom and is flexible. It can also be used for reconnaissance operations in narrow space.
The robot walking module adopts the "fin arm" crawler structure, which makes the robot have super obstacle climbing ability and can adapt to a variety of complex terrain such as sand, rubble, grassland and so on. The structure of the robot is firm, light, dustproof, waterproof, shockproof and anti-corrosion. All performance indexes meet the requirements of the national military standard.
With strong obstacle climbing ability and fin arm crawler structure, the robot can easily climb stairs, gullies and other obstacles.
Fast movement speed, equivalent to human trotting speed, stepless speed change, and also has large torque at low speed.
Small size, light weight, can be carried by one person, can be put into the trunk of the car, and the transportation is convenient.
Integrated mechanical arm pan tilt, 7 + 2 degrees of freedom design, more flexible grasping and observation.
Modular design, battery module, PTZ module and manipulator module can be quickly disassembled and replaced, which is convenient for maintenance.
Strong protection, dustproof, waterproof, shockproof and anti-corrosion. All performance indexes meet the requirements of the national military standard.
With high intelligence, it has a variety of intelligent operation functions, such as one key deployment, one key reset, auxiliary grasping, auxiliary obstacle crossing and so on.
![]()
Firstly judge the quality of the object before control the robot to capture the object. The highest quota load level is 4kg of horizontal capture and 7kg of bending capture. The arm may be damaged if captures more than above weights.
The bending gesture is used to capture the object as far as possible for the actual weight of the object can hardly be judged correctly. Thus, the operator can avoid the tipping forward caused by the object with excessive weight.
When unfold to capture the object, the robot shall rotate the Swinging arm forward and touch the ground slightly for a support against the tipping. Even when with the Swinging arm, the robot shall not capture the object over 3kg to avoid the damage on the drive gear box of the Swinging arm.
Please apply the 3D movement mode for the capture of mechanical arm with double effect and less effort.
Four cameras are used for mutual observation as far as possible.
3D movement mode can be used for the detection mode on the high place. Specific operations are as below: firstly, the robot moves to semi-unfolding mode, and then chooses 3D movement mode. Swirl the rocker on the left to control the mechanical arm of the robot.
As to the detection on the low place, the robot can be firstly changed to the observation mode and then the 3D movement mode is chosen. Control the left rocker of the robot to control the movement of the P/T camera.
Transfer and destruction of suspicious items in public places (subway, airport, railway station, shopping mall, conference center, etc.).
Dud removal, roadside bomb removal, mine removal and other application environments.
Capture and transfer of substances in hazardous biochemical and toxic environment.
Reconnaissance, detection, object capture and transfer in the post disaster ruins environment.
Capture and transfer of articles in nuclear radiation environment, simple detection and maintenance.
Item | Specification |
Portable Controller | Real-time display of robot status,fast and convenient operation |
Mechanical Arm | 7+2 DOF |
Size | 830mm×550mm×430mm(Arm Folded) |
Self Weight | ≤40kg |
Battery | 24V,20AH(Optional 24V,40AH) |
LoadWeight | ≥70kg |
Max Speed | ≥1.5m/s |
Turn Radius | Situ Turning |
Obstacle Surmount | ≥200mm Obstacle | ≥38°Stairs| ≥40°Slopes |
Working Time | 3 Hours |
Protection Grade | IP65 |
Tracked Arm Length | ≥164mm |
Maximum Length of Mechanical Arm | ≥2000mm |
Grip Width | 3~170mm |
Contact us now!!



